|
I'm a 2nd year PhD at Stanford AI Lab, co-advised by Jeannette Bohg and Dorsa Sadigh. My research has focused on developing sample-efficient methods for robotic perception and robustness to uncertainty. Before Stanford, I was at Berkeley Artificial Intelligence Research (BAIR) and the AUTOLAB where I was advised by Prof. Ken Goldberg. I did my bachelors degree at Berkeley in CS. Email / Google Scholar / Github / Linkedin |

|
|
|
|
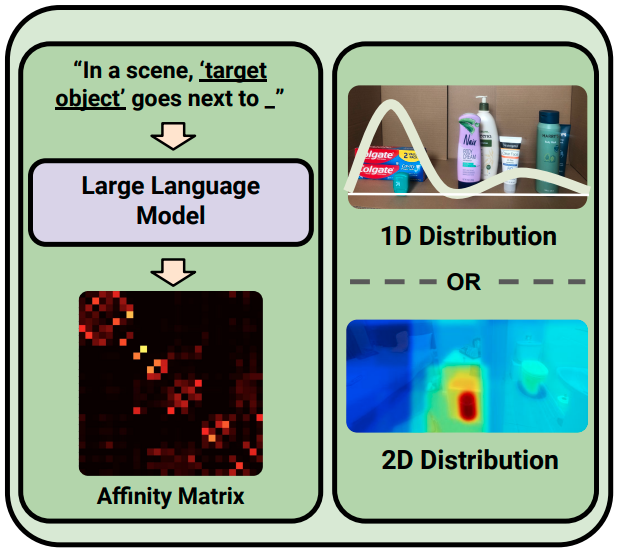
Satvik Sharma, Kaushik Shivakumar, Huang Huang, Lawrence Yunliang Chen, Ryan Hoque, Brian Ichter, Ken Goldberg Conference on Robot Learning (CoRL), 2023 PDF / Bibtex Modular framework explicitly separating VLMs and LLMs for occluded object search, which outperforms CLIP-based methods. |
|
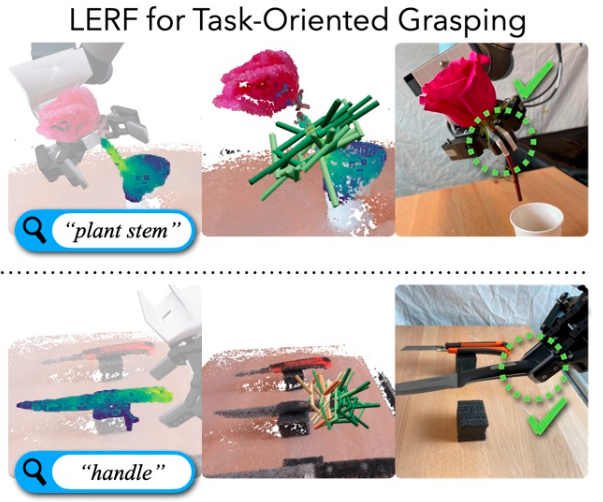
Adam Rashid*, Satvik Sharma*, Chung Min Kim, Justin Kerr, Lawrence Yunliang Chen, Angjoo Kanazawa, Ken Goldberg (* Denotes Equal Contribution, Alphabetically Ordered) Conference on Robot Learning (CoRL), 2023 - Best Paper Finalist Website / PDF / Bibtex LERF-TOGO uses CLIP and DINO features for language-specified tasks performing zero-shot semantic grasping. |
|
|
|
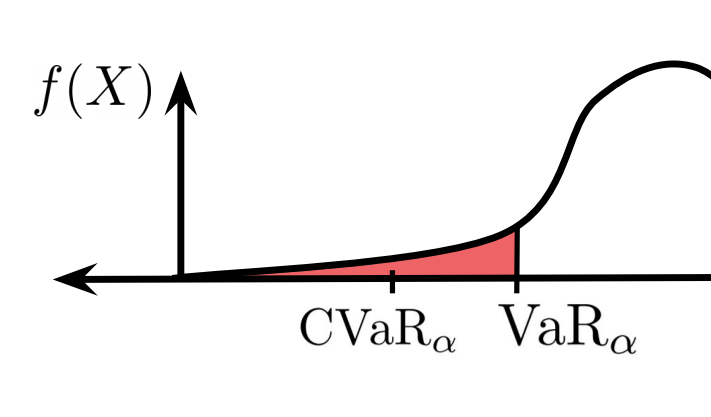
Zaynah Javed*, Daniel Brown*, Satvik Sharma, Jerry Zhu, Ashwin Balakrishna, Marek Petrik, Anca D. Dragan, Ken Goldberg International Conference on Machine Learning (ICML), 2021 Website / PDF / Bibtex A scalable and robust RL algorithm which optimizes for a combination of expected performance and tail risk under a distribution over learned reward functions. |
|
Ryan Hoque, Lawrence Yunliang Chen, Satvik Sharma, Karthik Dharmarajan, Brijen Thananjeyan, Pieter Abbeel, Ken Goldberg Conference on Robot Learning (CoRL), 2022 - Oral Presentation Website / PDF / Bibtex We introduce new formalism, algorithms, and open-source benchmarks for "Interactive Fleet Learning": interactive learning with multiple robots and multiple humans. . |
|
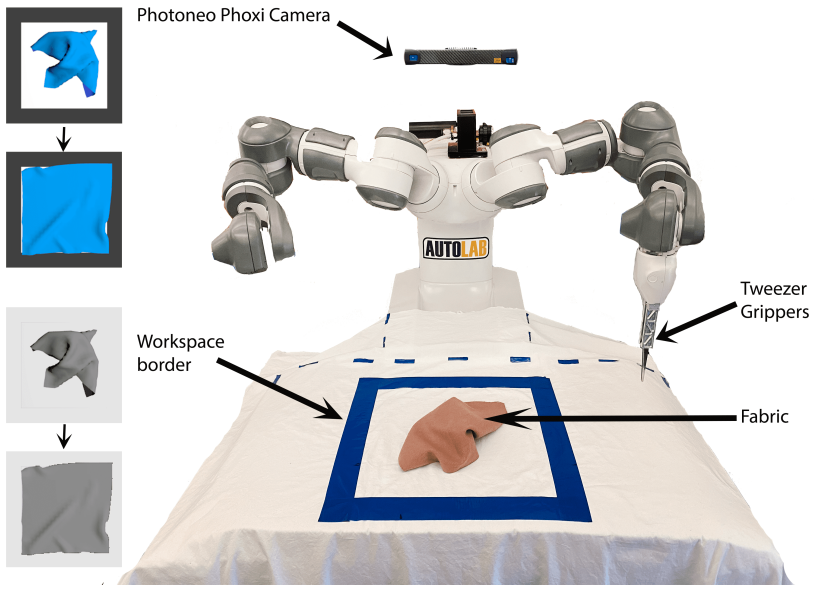
Satvik Sharma*, Ellen Novoseller*, Vainavi Viswanath, Zaynah Javed, Rishi Parikh, Ryan Hoque, Ashwin Balakrishna, Daniel S. Brown, Ken Goldberg (* Denotes Equal Contribution) Conference on Automation Science and Engineering (CASE), 2022 PDF / Bibtex We study strategies to automatically determine when policies trained in simulation can be reliably transferred to a physical robot, specifically for a fabric smoothing task. |
|
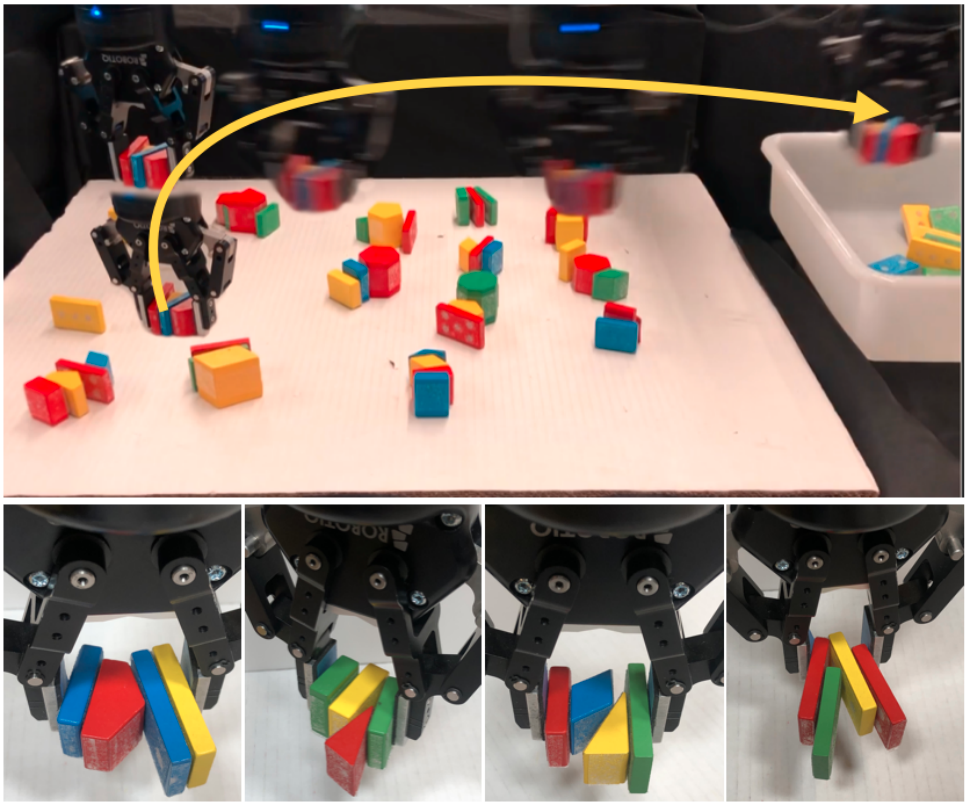
Wisdom C. Agboh*, Satvik Sharma*, Kishore Srinivas, Mallika Parulekar, Gaurav Datta, Tianshuang Qiu, Jeffrey Ichnowski, Eugen Solowjow, Mehmet Dogar, Ken Goldberg (* Denotes Equal Contribution) International Conference on Intelligent Robots and Systems (IROS), 2023 PDF / Bibtex Planning multi-object grasps under frictional constraints using a grasp success predictor network trained in real. We increase picks per hour over baselines and are robust to grasp and state uncertainity. |
|
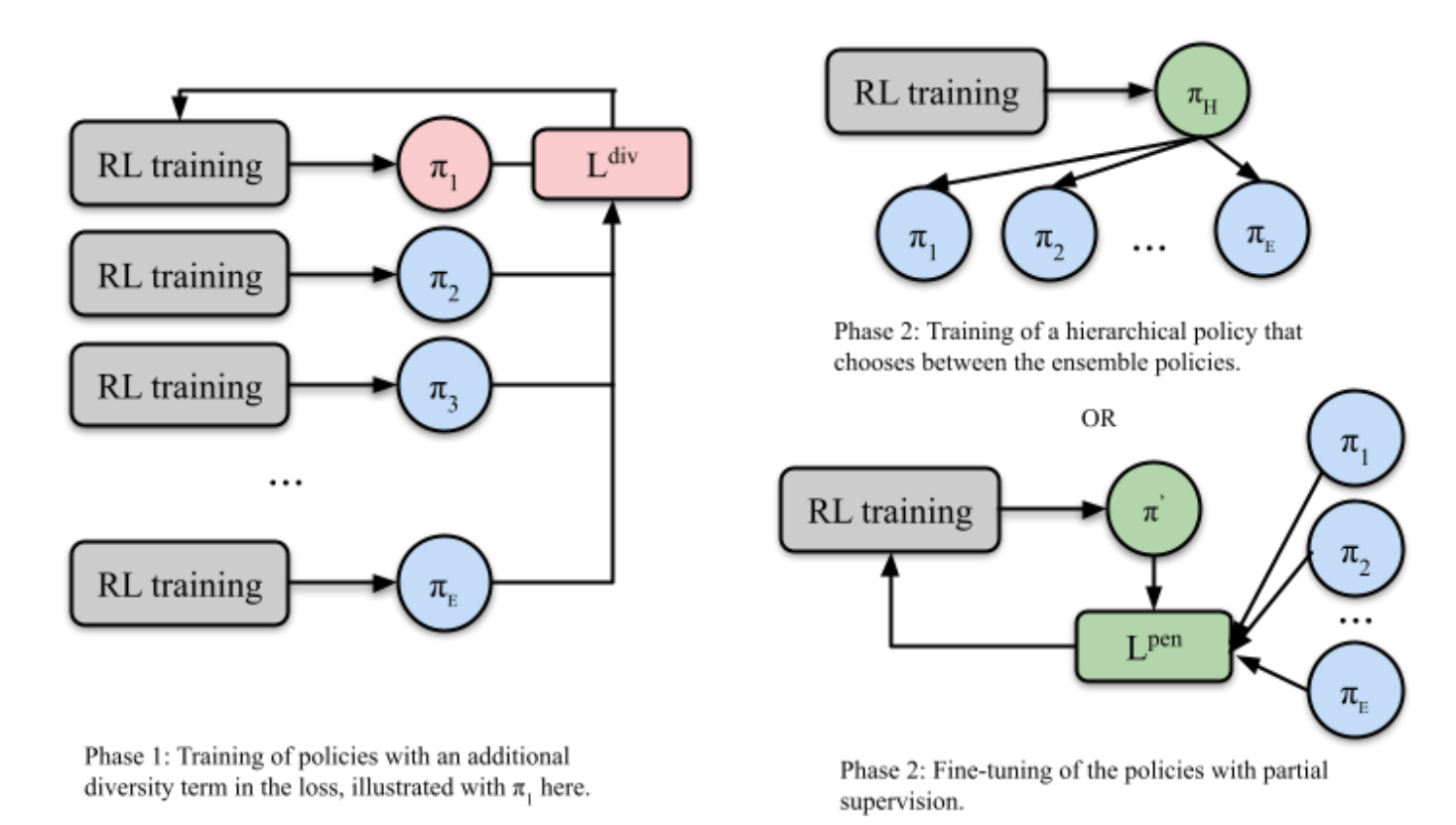
Simeon Adebola*, Satvik Sharma*, Kaushik Shivakumar* (* Equal Contribution, Alphabetically Ordered) arxiv, 2022 PDF / Bibtex We study how we can use pretrained ensembles - encouraged via a KL-divergence in their loss function to be as diverse as possible - to then generalize to new tasks using RL. |
|
|

|
Simeon Adebola, Rishi Parikh, Mark Presten, Satvik Sharma, Shrey Aeron, Ananth Rao, Sandeep Mukherjee, Tomson Qu, Christina Wistrom, Eugen Solowjow, Ken Goldberg International Conference on Robotics and Automation (ICRA), 2023 - Outstanding Automation Paper Finalist PDF / Bibtex Comparing the AlphaGarden system (simulator and Farmbot actuation) against professional horticulturalists in terms of plant diversity and canopy coverage. |

|
Mark Presten, Rishi Parikh, Shrey Aeron, Sandeep Mukherjee, Simeon Adebola, Satvik Sharma, Mark Theis, Walter Teitelbaum, Ken Goldberg Conference on Automation Science and Engineering (CASE), 2022 - Best Paper Award PDF / Bibtex Fully autonomous system for pruning polyculture plants with specialized vision algorithms for identifying plants and tracking their centers. |